ОСНОВЫ СЪЕМКИ С ПРИМЕНЕНИЕМ GNSS ПРИЕМНИКОВ
RTK (Real-Time Kinematic — кинематика в реальном времени) — метод съемки, при котором делается запрос, чтобы мобильный приемник практически мгновенно определял координаты своего текущего местоположения с сантиметровой точностью.
Используются два приемника: один (база) устанавливается на выбранном пункте, в то время как другой (ровер) используется для съемки.
База будет либо:
- пользовательская собственная база с UHF радиомодемом, или GSM модемом или другим внешним устройством для передачи поправок.
- принадлежащая третьему лицу, управляющему базой или сетью базовых станций (соединение происходит с помощью NTRIP протокола), и предоставляющему данные роверу через GSM/GPRS модем.
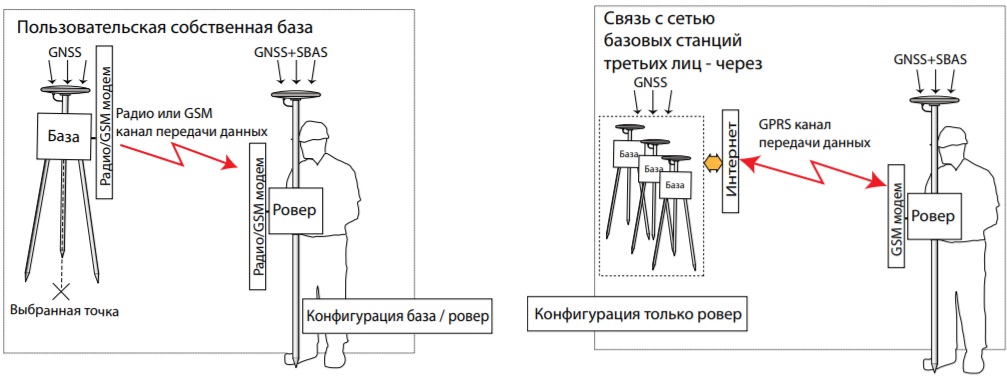
Для передачи RTK поправок базового приемника (базы) к роверу должен быть установлен канал передачи данных.
Передача данных может быть осуществлена несколькими способами:
– UHF радио
– сотовый модем (GSM, GPRS или CDMA)
– другие внешние устройства (такие как Wi-Fi и др.).
Успешная съемка требует инициализации системы и сохранения инициализации в течение всей съемки.
Может быть несколько одновременно работающих роверов, причем каждый получает данные RTK поправок от той же самой базы.
Как осуществляется съемка точек?
Определение и регистрация координат пунктов осуществляется в выбранной системе координат.
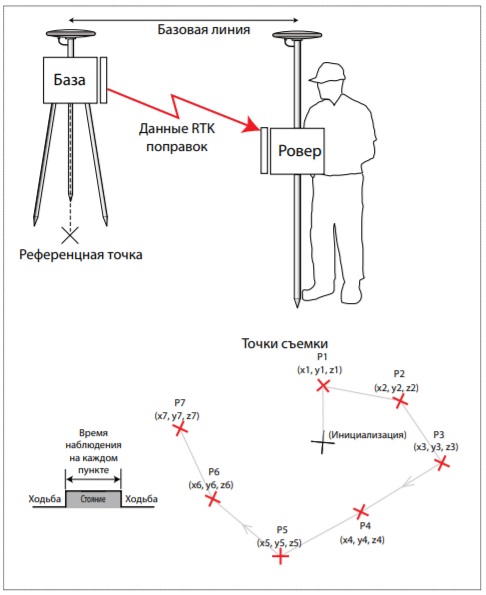
Ключевые моменты
• Перед началом работы необходимо удостовериться, что ровер получает RTK положение (инициализация должна быть достигнута и поддерживаться).
• Антенную вешку необходимо удерживать вертикально на каждом пункте съемки (если не используется приемник с компенсацией наклона).
• Время съемки на каждом пункте устанавливается пользователем (количество эпох).
• В течение отсчета эпох ровер усредняет последовательные положения, которые он вычисляет.
• При количестве эпох = 1 ровер регистрирует только первое положение, которое он вычисляет на этом пункте (нет усредненного положения).
Что такое автоматическая съемка по времени или интервалу?
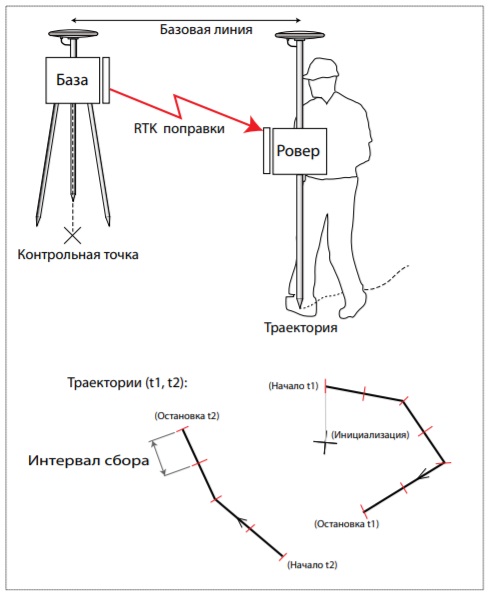
• Антенную вешку необходимо удерживать вертикально во время движения по всей траектории.
• Пункты автоматически регистрируются с равномерным интервалом по времени или по расстоянию. Перед началом съемки необходимо установить интервал
регистрации.
• Так как съемка осуществляется вдоль траектории, то все регистрируемые пункты будут обязательно “единожды снятыми“ точками, то есть первое решение положения, доступное во время регистрации точки, будет сохранено (в этом случае никакое усреднение положения не возможно).
Как осуществляется вынос точек в натуру?
Направляясь в поле для поиска точного расположения точек, необходимо маркировать их соответствующим образом и затем регистрировать их положения с помощью ровера.
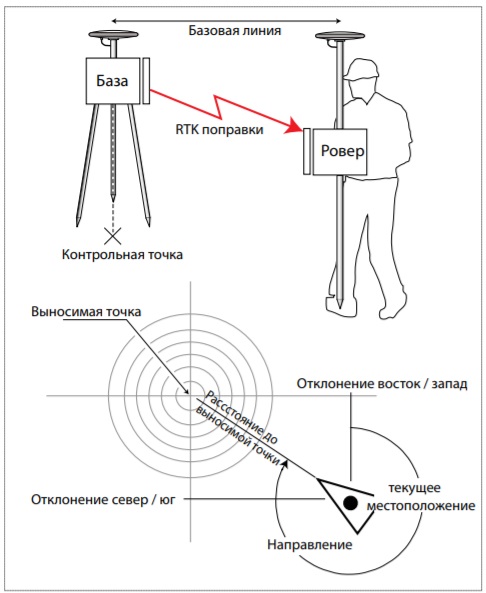
• Выберите нужную точку из списка точек, предварительно загрузив список в полевой контроллер. После выбора точки экран контроллера будет вести к выносимой точке.
• Удерживайте антенную вешку вертикально, поскольку система ведет к точке. Система сообщит, когда антенна приемника окажется над точкой.
• Когда антенна приемника окажется над точкой, закрепите ее положение на земле. Можно сохранить координаты выносимой точки.
Что такое съемка с постобработкой?
При съемке с постобработкой полевое оборудование используется только для записи гнсс антенны сырых данных, которые программное обеспечение постобработки сможет обсчитать для получения положения с сантиметровой точностью.
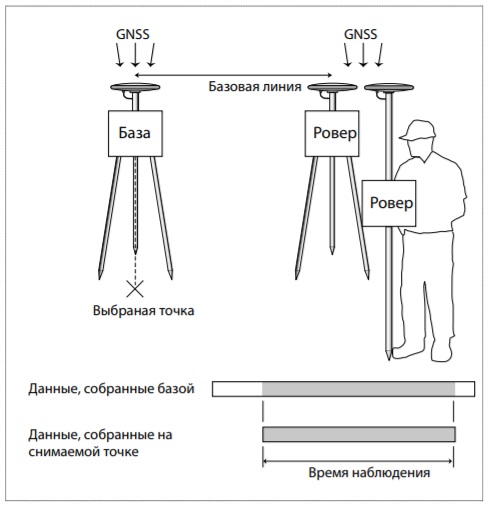
1.Используются две системы: одна (база) устанавливается на выбранном пункте, в то время как другая (ровер) используется для съемки. Базой может быть либо собственная база пользователя, тогда база должна быть расположена должным образом, или база, управляемая третьим лицом.
Для требуемого для постобработки времени наблюдений данные от базы третьих лиц могут быть получены через Интернет (CORS, RGP). Данные мобильного приемника могут быть также подгружены к данным базы (OPUS), обеспечивая вычисление положения с сантиметровой точностью.
2. Данные должны быть собраны одновременно базой и ровером. Всегда используйте одну и ту же частоту записи сырых данных на обоих приемниках.
3. Успешная съемка требует надлежащей инициализации системы. Поддерживать инициализацию на всем протяжении съемки нужно всегда, особенно надо быть осторожным при кинематических съемках, чтобы не “закрыть видимость” GNSS антенне ровера.
4. Время наблюдений определяется установкой (стартом) последнего устройства и выключением (окончанием работы) первого устройства. Желательно сначала начать наблюдения на базе и выключить ее последней.
5. Требуемое время наблюдений главным образом зависит от длины базовой линии, условий приема и метода используемой инициализации.
6. Помните, ровер всегда будет собирать данные непрерывно на всем протяжении съемки, выполняется ли статическая, непрерывная кинематическая или кинематическая Stop & Go съемки. Именно поэтому необходимо непрерывно держать GNSS антенну, так чтобы она не была закрыта никакими преградами.
7. В одно и тоже время можно осуществлять сбор данных несколькими роверами.